X
Код презентации скопируйте его
ГИС с открытым ПО
Скачать эту презентацию































Презентация на тему ГИС с открытым ПО
Скачать эту презентациюCлайд 1
 Московский Государственный Университет геодезии Геодезии и Картографии (МИИГАиК) “ГИС с открытым ПО” Выполнил студент ФПКиФ ИСИиТ IV-1c Барбасов Вячеслав Москва 2012г
Московский Государственный Университет геодезии Геодезии и Картографии (МИИГАиК) “ГИС с открытым ПО” Выполнил студент ФПКиФ ИСИиТ IV-1c Барбасов Вячеслав Москва 2012г
Cлайд 2
 Студент ФПКиФ 4курса: Барбасов В. К. Научный руководитель: проф. Гречищев. E-mail: тел.: krechet_kopter@yahoo.com +7 (909) 680-55-68
Студент ФПКиФ 4курса: Барбасов В. К. Научный руководитель: проф. Гречищев. E-mail: тел.: krechet_kopter@yahoo.com +7 (909) 680-55-68
Cлайд 3
 История развития открытого ПО ГИС начинается с конца 70-х, начала 80-х годов 20 века, и связана с созданием в 1978 году по инициативе Службы охраны рыбных ресурсов и диких животных США открытой векторной ГИС MOSS (Map Overlay and Statistical System), появление которой является одним из ключевых событий, определивших дальнейшее направление развития геоинформационных систем. Несмотря на то, что MOSS появилась первой, большую известность и широкое распространение получила другая ГИС - GRASS (Geographic Resources Analysis Support System), возникшая как альтернатива коммерческому продукту ARC/INFO компании ESRI. Разработка GRASS началась в 1982 году военными США . Однако официально статус открытой ГИС GRASS получила спустя 17 лет в 1999 году. В настоящее время GRASS имеет большое количество пользователей и независимых разработчиков и часто встречается в академической среде Основные особенности открытого ПО согласно определению включают свободное распространение, доступный исходный код, разрешение на модификацию этого исходного кода
История развития открытого ПО ГИС начинается с конца 70-х, начала 80-х годов 20 века, и связана с созданием в 1978 году по инициативе Службы охраны рыбных ресурсов и диких животных США открытой векторной ГИС MOSS (Map Overlay and Statistical System), появление которой является одним из ключевых событий, определивших дальнейшее направление развития геоинформационных систем. Несмотря на то, что MOSS появилась первой, большую известность и широкое распространение получила другая ГИС - GRASS (Geographic Resources Analysis Support System), возникшая как альтернатива коммерческому продукту ARC/INFO компании ESRI. Разработка GRASS началась в 1982 году военными США . Однако официально статус открытой ГИС GRASS получила спустя 17 лет в 1999 году. В настоящее время GRASS имеет большое количество пользователей и независимых разработчиков и часто встречается в академической среде Основные особенности открытого ПО согласно определению включают свободное распространение, доступный исходный код, разрешение на модификацию этого исходного кода
Cлайд 4
 В истории развития геоинформационных систем можно выделить четыре периода (Таблица.1 ) Пионерный период поздние 1950-е - ранние 1970-е гг. Исследование принципиальных возможностей, пограничных областей знаний и технологий, наработка эмпирического опыта, первые крупные проекты и теоретические работы Период государственных инициатив ранние 1970-е - ранние 1980-е гг. Развитие крупных геоинформационных проектов поддерживаемых государством, формирование государственных институтов в области ГИС, снижение роли и влияния отдельных исследователей и небольших групп Период коммерческого развития ранние 1980-е - настоящее время Широкий рынок разнообразных программных средств, развитие настольных ГИС, расширение области их применения за счет интеграции с базами непространственных данных, появление сетевых приложений, появление значительного числа непрофессиональных пользователей, системы, поддерживающие индивидуальные наборы данных на отдельных компьютерах, открывают путь системам, поддерживающим корпоративные и распределенные базы геоданных Пользовательский период поздние 1980-е - настоящее время Повышенная конкуренция среди коммерческих производителей геоинформационных технологий услуг дает преимущества пользователям ГИС, доступность и "открытость" программных средств позволяет использовать и даже модифицировать программы, появление пользовательских "клубов", телеконференций, территориально разобщенных, но связанных единой тематикой пользовательских групп, возросшая потребность в геоданных, начало формирования мировой геоинформационной инфраструктуры
В истории развития геоинформационных систем можно выделить четыре периода (Таблица.1 ) Пионерный период поздние 1950-е - ранние 1970-е гг. Исследование принципиальных возможностей, пограничных областей знаний и технологий, наработка эмпирического опыта, первые крупные проекты и теоретические работы Период государственных инициатив ранние 1970-е - ранние 1980-е гг. Развитие крупных геоинформационных проектов поддерживаемых государством, формирование государственных институтов в области ГИС, снижение роли и влияния отдельных исследователей и небольших групп Период коммерческого развития ранние 1980-е - настоящее время Широкий рынок разнообразных программных средств, развитие настольных ГИС, расширение области их применения за счет интеграции с базами непространственных данных, появление сетевых приложений, появление значительного числа непрофессиональных пользователей, системы, поддерживающие индивидуальные наборы данных на отдельных компьютерах, открывают путь системам, поддерживающим корпоративные и распределенные базы геоданных Пользовательский период поздние 1980-е - настоящее время Повышенная конкуренция среди коммерческих производителей геоинформационных технологий услуг дает преимущества пользователям ГИС, доступность и "открытость" программных средств позволяет использовать и даже модифицировать программы, появление пользовательских "клубов", телеконференций, территориально разобщенных, но связанных единой тематикой пользовательских групп, возросшая потребность в геоданных, начало формирования мировой геоинформационной инфраструктуры
Cлайд 5
 Открытое ПО ГИС проходит этап интенсивного развития, особенно в последние 3-4 года. Перечень FreeGIS.org на настоящий момент насчитывает более 350 открытых программных пакетов ГИС различного типа. Рисунок 1. Динамика роста кода программной базы настольной ГИС - QGIS
Открытое ПО ГИС проходит этап интенсивного развития, особенно в последние 3-4 года. Перечень FreeGIS.org на настоящий момент насчитывает более 350 открытых программных пакетов ГИС различного типа. Рисунок 1. Динамика роста кода программной базы настольной ГИС - QGIS
Cлайд 6
 Разработка QGIS началась в 2002 году группой энтузиастов. Целью разработки было создание простого в использовании и быстрого просмотрщика географических данных для операционных систем семейства Linux. Интерфейс пользователя Quantum GIS представлен на Рисунке 2. Рисунок 2. Пользовательский интерфейс Quantum GIS
Разработка QGIS началась в 2002 году группой энтузиастов. Целью разработки было создание простого в использовании и быстрого просмотрщика географических данных для операционных систем семейства Linux. Интерфейс пользователя Quantum GIS представлен на Рисунке 2. Рисунок 2. Пользовательский интерфейс Quantum GIS
Cлайд 7
 Существующее ПО ГИС можно условно поделить на 3 класса: это веб ГИС, настольные ГИС и пространственные базы данных. В таблице 2 представлены типовые стеки открытого ПО для веб и настольных ГИС. Таблица 2.1 Инструментальные слои открытых настольных платформ Тип ПО Представители Группа Приложения QGIS, GRASS, OSSIM, uDig, MapWindow GIS Пользовательский интерфейс Среда разработки Eclipse, QT, OpenGL, SharpDevelop Высокоуровневые утилиты GeoTools, PostGIS, MapWindow GIS ActiveX Хранение данных Высокоуровневые скриптовые языки программирования Python, Perl, R Обработка данных Низкоуровневые утилиты Shapelib, JTS/GEOS, GDAL/OGR, GMT Низкоуровневые языки программирования C, C++, Java, Fortran, C#, VB.NET Системное ПО Операционная система Linux, Microsoft Windows
Существующее ПО ГИС можно условно поделить на 3 класса: это веб ГИС, настольные ГИС и пространственные базы данных. В таблице 2 представлены типовые стеки открытого ПО для веб и настольных ГИС. Таблица 2.1 Инструментальные слои открытых настольных платформ Тип ПО Представители Группа Приложения QGIS, GRASS, OSSIM, uDig, MapWindow GIS Пользовательский интерфейс Среда разработки Eclipse, QT, OpenGL, SharpDevelop Высокоуровневые утилиты GeoTools, PostGIS, MapWindow GIS ActiveX Хранение данных Высокоуровневые скриптовые языки программирования Python, Perl, R Обработка данных Низкоуровневые утилиты Shapelib, JTS/GEOS, GDAL/OGR, GMT Низкоуровневые языки программирования C, C++, Java, Fortran, C#, VB.NET Системное ПО Операционная система Linux, Microsoft Windows
Cлайд 8
 Таблица 2.2 Инструментальные слои открытых веб платформ. Тип ПО Представители Группа Браузер Firefox, Safari Пользовательский интерфейс Клиентский скриптинг JavaScript, Java, Perl, Python Серверный скриптинг PHP, Perl, Python Хранение данных Высокоуровневые утилиты UMN MapServer, GeoServer Высокоуровневые скриптовые языки программирования PHP, Perl, Python Обработка данных Низкоуровневые утилиты Shapelib, JTS/GEOS, GDAL/OGR, GMT, PostGIS Низкоуровневые языки программирования C, C++, Java, Fortran Системное ПО Операционная система Linux, Microsoft Windows
Таблица 2.2 Инструментальные слои открытых веб платформ. Тип ПО Представители Группа Браузер Firefox, Safari Пользовательский интерфейс Клиентский скриптинг JavaScript, Java, Perl, Python Серверный скриптинг PHP, Perl, Python Хранение данных Высокоуровневые утилиты UMN MapServer, GeoServer Высокоуровневые скриптовые языки программирования PHP, Perl, Python Обработка данных Низкоуровневые утилиты Shapelib, JTS/GEOS, GDAL/OGR, GMT, PostGIS Низкоуровневые языки программирования C, C++, Java, Fortran Системное ПО Операционная система Linux, Microsoft Windows
Cлайд 9

Cлайд 10
Cлайд 11
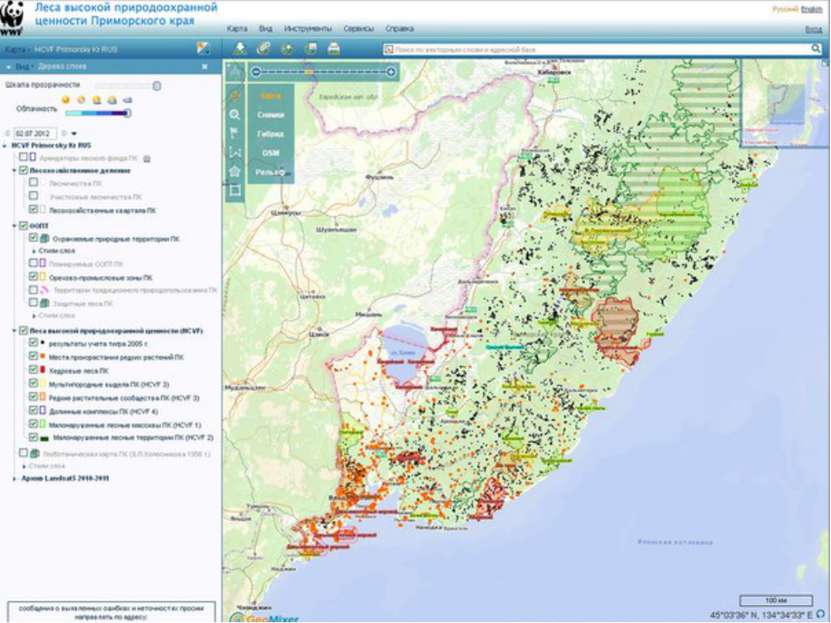
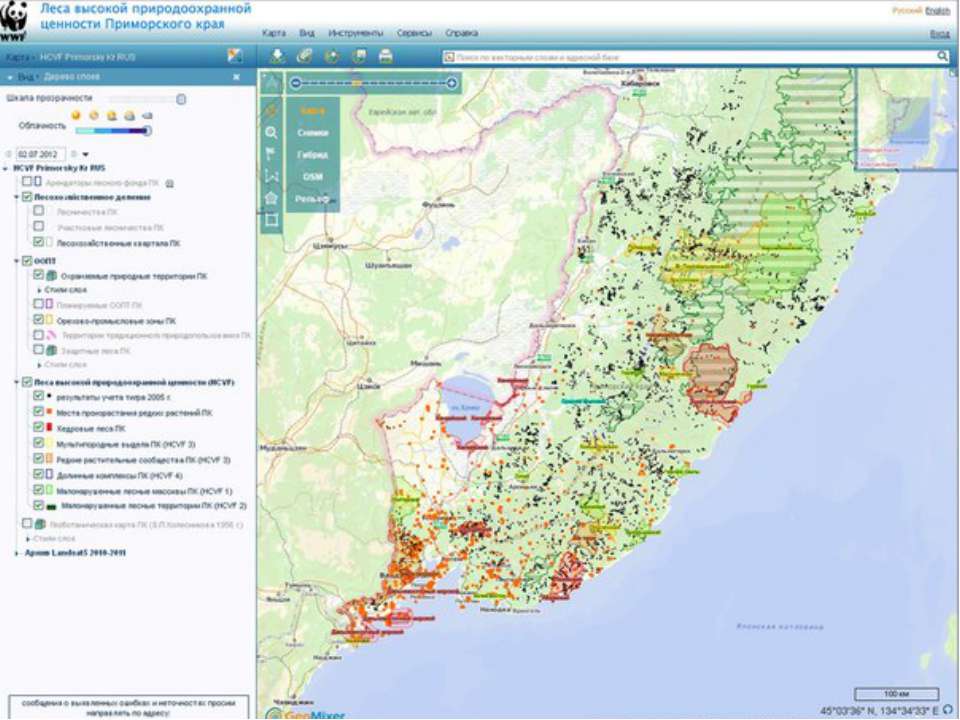
 ГеоМиксер
ГеоМиксер
Cлайд 12
 Данный БПЛА представляет собой радиоуправляемую летающую платформу на которой установлено от 3 - 16 бесколлекторных двигателей с пропеллерами. В полете платформа занимает горизонтальное положение относительно поверхности земли, может зависать над определенным местом, перемещаться влево, вправо, вперед, назад, вверх и вниз. В настоящее время, благодаря разработанному дополнительному оборудованию аппарат имеет возможность осуществлять фактически полуавтономные и автоматические полеты. БПЛА вертолетного типа “мультикоптер”
Данный БПЛА представляет собой радиоуправляемую летающую платформу на которой установлено от 3 - 16 бесколлекторных двигателей с пропеллерами. В полете платформа занимает горизонтальное положение относительно поверхности земли, может зависать над определенным местом, перемещаться влево, вправо, вперед, назад, вверх и вниз. В настоящее время, благодаря разработанному дополнительному оборудованию аппарат имеет возможность осуществлять фактически полуавтономные и автоматические полеты. БПЛА вертолетного типа “мультикоптер”
Cлайд 13
 Топокоптер «Дредноут» в работе Подвес топокоптера с фотокамерой Мультироторный БПЛА вертолетного типа разработанный в СКБ МИИГАиК «Кречет», – топокоптер «Дредноут». Аппарат может быть использован для получения снимков, пригодных для создания и обновления карт и планов местности, формирования цифровых моделей местности, 3D-моделей зданий и объектов, тепловизионных карт, проведения панорамной съемки, а также в интересах мониторинга развития чрезвычайных ситуаций (ЧС) природного и техногенного характера.
Топокоптер «Дредноут» в работе Подвес топокоптера с фотокамерой Мультироторный БПЛА вертолетного типа разработанный в СКБ МИИГАиК «Кречет», – топокоптер «Дредноут». Аппарат может быть использован для получения снимков, пригодных для создания и обновления карт и планов местности, формирования цифровых моделей местности, 3D-моделей зданий и объектов, тепловизионных карт, проведения панорамной съемки, а также в интересах мониторинга развития чрезвычайных ситуаций (ЧС) природного и техногенного характера.
Cлайд 14
 К полезной нагрузке для задач БПЛА могут относится: К полезной нагрузке для задач БПЛА могут относится: - цифровая фотокамера (видеокамера) -тепловизор -ИК-камера - радиолакационное обурудование (эхолот) - счетчик Гейгера
К полезной нагрузке для задач БПЛА могут относится: К полезной нагрузке для задач БПЛА могут относится: - цифровая фотокамера (видеокамера) -тепловизор -ИК-камера - радиолакационное обурудование (эхолот) - счетчик Гейгера
Cлайд 15
 Блок-схема передачи данных от Мультироторного БПЛА «Дредноут» в базу данных ГИС и конечному пользователю.
Блок-схема передачи данных от Мультироторного БПЛА «Дредноут» в базу данных ГИС и конечному пользователю.
Cлайд 16
 Выводы: Малые БПЛА могут использоваться в рамках проекта ГИОК ДЗЧС для следующих целей: – сбор информации для радиометрической калибровки данных дистанционного зондирования; – оперативное обновление баз пространственных данных ГИОК ДЗЧС; – прием и передача информации чрезвычайного характера с помощью мобильных платформ, когда традиционные коммуникационные каналы повреждены или не функционируют в нормальном режиме; – съемка в разных спектральных диапазонах зон протекания ЧС с высоким разрешением.
Выводы: Малые БПЛА могут использоваться в рамках проекта ГИОК ДЗЧС для следующих целей: – сбор информации для радиометрической калибровки данных дистанционного зондирования; – оперативное обновление баз пространственных данных ГИОК ДЗЧС; – прием и передача информации чрезвычайного характера с помощью мобильных платформ, когда традиционные коммуникационные каналы повреждены или не функционируют в нормальном режиме; – съемка в разных спектральных диапазонах зон протекания ЧС с высоким разрешением.
Cлайд 17
 Модель ориентированности на инновации реализуется в условиях, когда на рынке появляется новый продукт у которого нет прямого конкурента в коммерческом секторе. В этом случае также выпуск его под открытой лицензией имеет ряд преимуществ (пример GRASS) Рисунок 3. Границы сбыта и количество потенциальных покупателей в случае использования (a) — проприетарного ПО, (б) — открытого ПО
Модель ориентированности на инновации реализуется в условиях, когда на рынке появляется новый продукт у которого нет прямого конкурента в коммерческом секторе. В этом случае также выпуск его под открытой лицензией имеет ряд преимуществ (пример GRASS) Рисунок 3. Границы сбыта и количество потенциальных покупателей в случае использования (a) — проприетарного ПО, (б) — открытого ПО
Cлайд 18
 Открытые пользовательские ГИС находятся на стадии взросления, но безусловно заслуживают внимания и учёта в долгосрочном планировании, гарантируя существенную экономию на лицензиях, готовность к инновациям и эффективность разработки за счет использования готового программного кода Структурно ГИС можно разделить на клиентскую и серверную части Структурно ГИС можно разделить на клиентскую и серверную части Рис.4
Открытые пользовательские ГИС находятся на стадии взросления, но безусловно заслуживают внимания и учёта в долгосрочном планировании, гарантируя существенную экономию на лицензиях, готовность к инновациям и эффективность разработки за счет использования готового программного кода Структурно ГИС можно разделить на клиентскую и серверную части Структурно ГИС можно разделить на клиентскую и серверную части Рис.4
Cлайд 19
 Спасибо за внимание
Спасибо за внимание
Cлайд 20
 В таблице представлены тактико-технические характеристики самых популярных у нас и за рубежом мультироторных БПЛА для нужд мониторинга окружающей среды: аппарат “Dragnflyer X8” принятый на вооружение силовыми структурами США, и Аппарат “ZALA 421-21” принятый на вооружение силовых структур РФ. Топокоптер «Дредноут» и мультиротор 2ой версии разработанный в прошлом году в МИИГАиКе. (табл 1) Характеристика Dragnflyer X8 ZALA 421-21 Топокоптер Кречет “Дредноут” Мультиротор 2 версия Рабочий размер, мм 87х87х32 560х160х120 1100×1100×450 720×720×300 Транспортировочный размер, мм×мм×мм 36х70х26 560х160х120 1100×1100×250 720×170×150 Скорость горизонталь-ного полета, км/ч 0÷50 0÷40 0÷50 0÷45 Рабочая высота полёта над уровнем земли, м 10÷350 5÷1000 5÷500 Воздушный потолок, км 2,5 2,5 2,5 2,5 Продолжительность полета, мин. до 20 до 30 до 20 до 20 Максимальный взлетный вес, кг 2,7 10 2,7 Максимальная масса полезной нагрузки, кг 0,8 6 0,8 Взлетная масса, кг 1,7 1,5 4 1,7 Диапазон рабочих температур, °C -25 ÷ +50 -20°С...+40°С -25 ÷ +50 -25 ÷ +50 Скорость ветра на старте, не более, м/c 10 7 Скорость ветра на высоте , не более, м/c 12 9 Размер посадочной площадки, не менее, м×м 2×2 На руки 3×3 2×2 Обслуживающий персонал, чел. 1-2 1-2 2 1-2 Двигательная установка электромотор, шт. 8 6 8 6 Дополнительная курсовая камера (разрешение) (Управление по осям) Нет Да, (640х512), (1 ось) Да, (752x582), (2 оси) нет Складной Да нет нет да Основанная область применения Мониторинг, силовые структуры Мониторинг, силовые структуры Картография, Мониторинг Мониторинг
В таблице представлены тактико-технические характеристики самых популярных у нас и за рубежом мультироторных БПЛА для нужд мониторинга окружающей среды: аппарат “Dragnflyer X8” принятый на вооружение силовыми структурами США, и Аппарат “ZALA 421-21” принятый на вооружение силовых структур РФ. Топокоптер «Дредноут» и мультиротор 2ой версии разработанный в прошлом году в МИИГАиКе. (табл 1) Характеристика Dragnflyer X8 ZALA 421-21 Топокоптер Кречет “Дредноут” Мультиротор 2 версия Рабочий размер, мм 87х87х32 560х160х120 1100×1100×450 720×720×300 Транспортировочный размер, мм×мм×мм 36х70х26 560х160х120 1100×1100×250 720×170×150 Скорость горизонталь-ного полета, км/ч 0÷50 0÷40 0÷50 0÷45 Рабочая высота полёта над уровнем земли, м 10÷350 5÷1000 5÷500 Воздушный потолок, км 2,5 2,5 2,5 2,5 Продолжительность полета, мин. до 20 до 30 до 20 до 20 Максимальный взлетный вес, кг 2,7 10 2,7 Максимальная масса полезной нагрузки, кг 0,8 6 0,8 Взлетная масса, кг 1,7 1,5 4 1,7 Диапазон рабочих температур, °C -25 ÷ +50 -20°С...+40°С -25 ÷ +50 -25 ÷ +50 Скорость ветра на старте, не более, м/c 10 7 Скорость ветра на высоте , не более, м/c 12 9 Размер посадочной площадки, не менее, м×м 2×2 На руки 3×3 2×2 Обслуживающий персонал, чел. 1-2 1-2 2 1-2 Двигательная установка электромотор, шт. 8 6 8 6 Дополнительная курсовая камера (разрешение) (Управление по осям) Нет Да, (640х512), (1 ось) Да, (752x582), (2 оси) нет Складной Да нет нет да Основанная область применения Мониторинг, силовые структуры Мониторинг, силовые структуры Картография, Мониторинг Мониторинг
Cлайд 21
 Безусловно самым привлекательным параметром открытого программного обеспечения ГИС является цена лицензии, как правило отсутствующая. Редким примером исключения является например расширение ZigGIS, позволяющее работать с базами данных PostGIS в ArcGIS Desktop. Исходный код этого ПО распространяется свободно для персонального использования и обучения, ПО готовое к использованию и коммерческое использование требует покупки лицензии. Рисунок 4. Концептуальное сравнение процесса формирование цены продукта для пользователя и производителя
Безусловно самым привлекательным параметром открытого программного обеспечения ГИС является цена лицензии, как правило отсутствующая. Редким примером исключения является например расширение ZigGIS, позволяющее работать с базами данных PostGIS в ArcGIS Desktop. Исходный код этого ПО распространяется свободно для персонального использования и обучения, ПО готовое к использованию и коммерческое использование требует покупки лицензии. Рисунок 4. Концептуальное сравнение процесса формирование цены продукта для пользователя и производителя
Cлайд 22
 Таблица 3. Сравнение программ поддержки открытого ПО ГИС компании OpenGeo Уровень поддержки Базовый Профессиональный Промышленный Цена $12 000 $30 000 $70 000 Исправление ошибок Не ограничено Не ограничено Не ограничено Сервисные функции Нет Обновление, Тренинги, Установка, Конфигурирование, Разработка Не ограничено Время ответа 1 день 1 день 4 часа Консультации по Email Не ограничено Не ограничено Не ограничено Консультации по телефону Нет Есть Есть Время работы Рабочие часы Рабочие часы 24/7
Таблица 3. Сравнение программ поддержки открытого ПО ГИС компании OpenGeo Уровень поддержки Базовый Профессиональный Промышленный Цена $12 000 $30 000 $70 000 Исправление ошибок Не ограничено Не ограничено Не ограничено Сервисные функции Нет Обновление, Тренинги, Установка, Конфигурирование, Разработка Не ограничено Время ответа 1 день 1 день 4 часа Консультации по Email Не ограничено Не ограничено Не ограничено Консультации по телефону Нет Есть Есть Время работы Рабочие часы Рабочие часы 24/7
Cлайд 23
 Функциональная схема аппарата с подвесом
Функциональная схема аппарата с подвесом
Cлайд 24
 В то время как базы данных и картографические веб-сервера заняли достаточно устойчивую нишу в производстве, настольные ГИС находятся на стадии активного поиска своей ниши. Таблица 3. Сравнение основных открытых пользовательских ГИС в части функциональности по созданию простых проектов Открытые GRASS 6.4.0 QGIS 1.4 UdIg 1.1 gvSIG 1.8 SAGA 2.0.4 MapWindow 4.7 ILWIS 3.4 open-dragon ldipinter2.plan GeoMixer Лицензия GPL GPL LGPL GPL MPL GPL GPL Чтение векторных данных SHP GML DXF + + + + + + + + - + + + + - + + - + + - + + + + + Запись векторных данных SHP GML DXF + + + + + - + + - + + + + - - + - - + - + + + + + + + Чтение растровых данных JPEG GeoTIFF ECW Arc/info GRID + + + + + + - + + + - - + + + - + + + + + + + + + + + + + + + + + + Запись растровых данных JPEG GeoTiff ECW Arc/Info GRID + + + - + + + - + + - - + + - - + + + - + + - - + + - - + + + + Базы данных Ч=Чтение З=запись PostGIS ArcSDE Oracle З+Ч - Ч З+Ч - - З+Ч З+Ч З+Ч З+Ч З+Ч З+Ч - - - З+Ч - - - - - Поддержка стандартов OGC WMS, WFS, SFS, GML WMS, WFS, WFS-T, SFS, GML WMS, WFS, WCS, CSW, WFS-G WMS, WFS, WCS WMS, WFS WFS, WCS WMS, WFS, SFS, GML Рускоязычный интерфейс + + - + - - - - - + Рускоязычная документация + - - + - - - - - + Client-server + Функции обработки АКИ +
В то время как базы данных и картографические веб-сервера заняли достаточно устойчивую нишу в производстве, настольные ГИС находятся на стадии активного поиска своей ниши. Таблица 3. Сравнение основных открытых пользовательских ГИС в части функциональности по созданию простых проектов Открытые GRASS 6.4.0 QGIS 1.4 UdIg 1.1 gvSIG 1.8 SAGA 2.0.4 MapWindow 4.7 ILWIS 3.4 open-dragon ldipinter2.plan GeoMixer Лицензия GPL GPL LGPL GPL MPL GPL GPL Чтение векторных данных SHP GML DXF + + + + + + + + - + + + + - + + - + + - + + + + + Запись векторных данных SHP GML DXF + + + + + - + + - + + + + - - + - - + - + + + + + + + Чтение растровых данных JPEG GeoTIFF ECW Arc/info GRID + + + + + + - + + + - - + + + - + + + + + + + + + + + + + + + + + + Запись растровых данных JPEG GeoTiff ECW Arc/Info GRID + + + - + + + - + + - - + + - - + + + - + + - - + + - - + + + + Базы данных Ч=Чтение З=запись PostGIS ArcSDE Oracle З+Ч - Ч З+Ч - - З+Ч З+Ч З+Ч З+Ч З+Ч З+Ч - - - З+Ч - - - - - Поддержка стандартов OGC WMS, WFS, SFS, GML WMS, WFS, WFS-T, SFS, GML WMS, WFS, WCS, CSW, WFS-G WMS, WFS, WCS WMS, WFS WFS, WCS WMS, WFS, SFS, GML Рускоязычный интерфейс + + - + - - - - - + Рускоязычная документация + - - + - - - - - + Client-server + Функции обработки АКИ +
Cлайд 25

Cлайд 26
 Функциональная схема наземной станции управления
Функциональная схема наземной станции управления
Cлайд 27
 GSM/GPRS/GPS трекер
GSM/GPRS/GPS трекер
Cлайд 28
 Наиболее крупные проекты привлекают большое количество разработчиков и вложения в разработку достаточно серьезны (Таблица 1). Сам факт открытого предоставления подобной информации является показательным для открытого ПО и невозможен в случае проприетарного. Таблица 1. Характеристики программной базы и оценки затрат некоторых открытых ГИС (прирост за последний год, без учета документации и переводов, оценка затрат в расчете 55000 USD/год на разработчика). На основе: OSGeo Проект Строк кода, тыс. (прирост) Разработчиков, чел. Затраты, чел./год Оценка затрат, тыс. $USD GRASS GIS 737 (42%) 62 200 11000 gvSIG 2162 (20%) 62 609 33495 Quantum GIS 440 (227%) 40 114 6270 GDAL 1035 (67%) 29 337 18535
Наиболее крупные проекты привлекают большое количество разработчиков и вложения в разработку достаточно серьезны (Таблица 1). Сам факт открытого предоставления подобной информации является показательным для открытого ПО и невозможен в случае проприетарного. Таблица 1. Характеристики программной базы и оценки затрат некоторых открытых ГИС (прирост за последний год, без учета документации и переводов, оценка затрат в расчете 55000 USD/год на разработчика). На основе: OSGeo Проект Строк кода, тыс. (прирост) Разработчиков, чел. Затраты, чел./год Оценка затрат, тыс. $USD GRASS GIS 737 (42%) 62 200 11000 gvSIG 2162 (20%) 62 609 33495 Quantum GIS 440 (227%) 40 114 6270 GDAL 1035 (67%) 29 337 18535
Cлайд 29
 Наиболее важное и принципиальное различие всех БД - в способах организации доступа к информации в БД в условиях работы в корпоративной сети. С этой точки зрения все базы данных можно разделить на два больших класса: БД, работающие по технологии ФАЙЛ-СЕРВЕР: Обработка запроса одного пользователя: - Обращение к БД (запрос) - Перекачка данных с блокировкой доступа других пользователей - Обработка данных на компьютере пользователя
Наиболее важное и принципиальное различие всех БД - в способах организации доступа к информации в БД в условиях работы в корпоративной сети. С этой точки зрения все базы данных можно разделить на два больших класса: БД, работающие по технологии ФАЙЛ-СЕРВЕР: Обработка запроса одного пользователя: - Обращение к БД (запрос) - Перекачка данных с блокировкой доступа других пользователей - Обработка данных на компьютере пользователя
Cлайд 30
 БД, работающие по технологии КЛИЕНТ-СЕРВЕР: Обработка запроса одного пользователя: - Обращение к БД (SQL-запрос) - Передача ответа - результата обработки
БД, работающие по технологии КЛИЕНТ-СЕРВЕР: Обработка запроса одного пользователя: - Обращение к БД (SQL-запрос) - Передача ответа - результата обработки
Cлайд 31
 Инструментальные ГИС: распределение по числу инсталляций. Российский рынок программного обеспечения геоинформационных систем AutoCAD 14% PC Arc/Info 9% GeoDraw/GeoGraph 9% MapInfo 5% ГИС-ПАРК 3% Procart 3% GeoCad 2% Инфосо 2% WS Arc/Info 2% ArcCAD 2% Синтекс/Три 2% MGE 2% ATE AutoCAD 1% Другие 44%
Инструментальные ГИС: распределение по числу инсталляций. Российский рынок программного обеспечения геоинформационных систем AutoCAD 14% PC Arc/Info 9% GeoDraw/GeoGraph 9% MapInfo 5% ГИС-ПАРК 3% Procart 3% GeoCad 2% Инфосо 2% WS Arc/Info 2% ArcCAD 2% Синтекс/Три 2% MGE 2% ATE AutoCAD 1% Другие 44%
Cлайд 32
 Несмотря Рис.2. ГИС-вьюверы: распределение по числу инсталляций. PC ArcViewer 41% VistaMap 15% WS ArcView 12% WinMap 10% Spans Map 10% Другие 12%
Несмотря Рис.2. ГИС-вьюверы: распределение по числу инсталляций. PC ArcViewer 41% VistaMap 15% WS ArcView 12% WinMap 10% Spans Map 10% Другие 12%
Cлайд 33
 Рис. 3. Классы и функции геоинформационного программного обеспечения. Класс/Функции Ввод атрибутивных данных Ввод цифровой основы Создание баз данных всех типов Пространствен-ный информа-ционный вопрос Пространствен-ный анализ и моделирова- ние Инструменталь- ные ГИС Да Да Да Да Да ГИС-вьюверы Ограничен Ограничен Нет Да Нет Справочные картографические системы Ограничен Нет Нет Да Нет Векторизаторы картографических изображений Ограничен Да Ограничено Нет Нет Средства пространственного моделирования Да Нет Ограничено Нет Да Средство обработки данных зондирования Ограничен Да Ограничено Да Ограничено
Рис. 3. Классы и функции геоинформационного программного обеспечения. Класс/Функции Ввод атрибутивных данных Ввод цифровой основы Создание баз данных всех типов Пространствен-ный информа-ционный вопрос Пространствен-ный анализ и моделирова- ние Инструменталь- ные ГИС Да Да Да Да Да ГИС-вьюверы Ограничен Ограничен Нет Да Нет Справочные картографические системы Ограничен Нет Нет Да Нет Векторизаторы картографических изображений Ограничен Да Ограничено Нет Нет Средства пространственного моделирования Да Нет Ограничено Нет Да Средство обработки данных зондирования Ограничен Да Ограничено Да Ограничено












